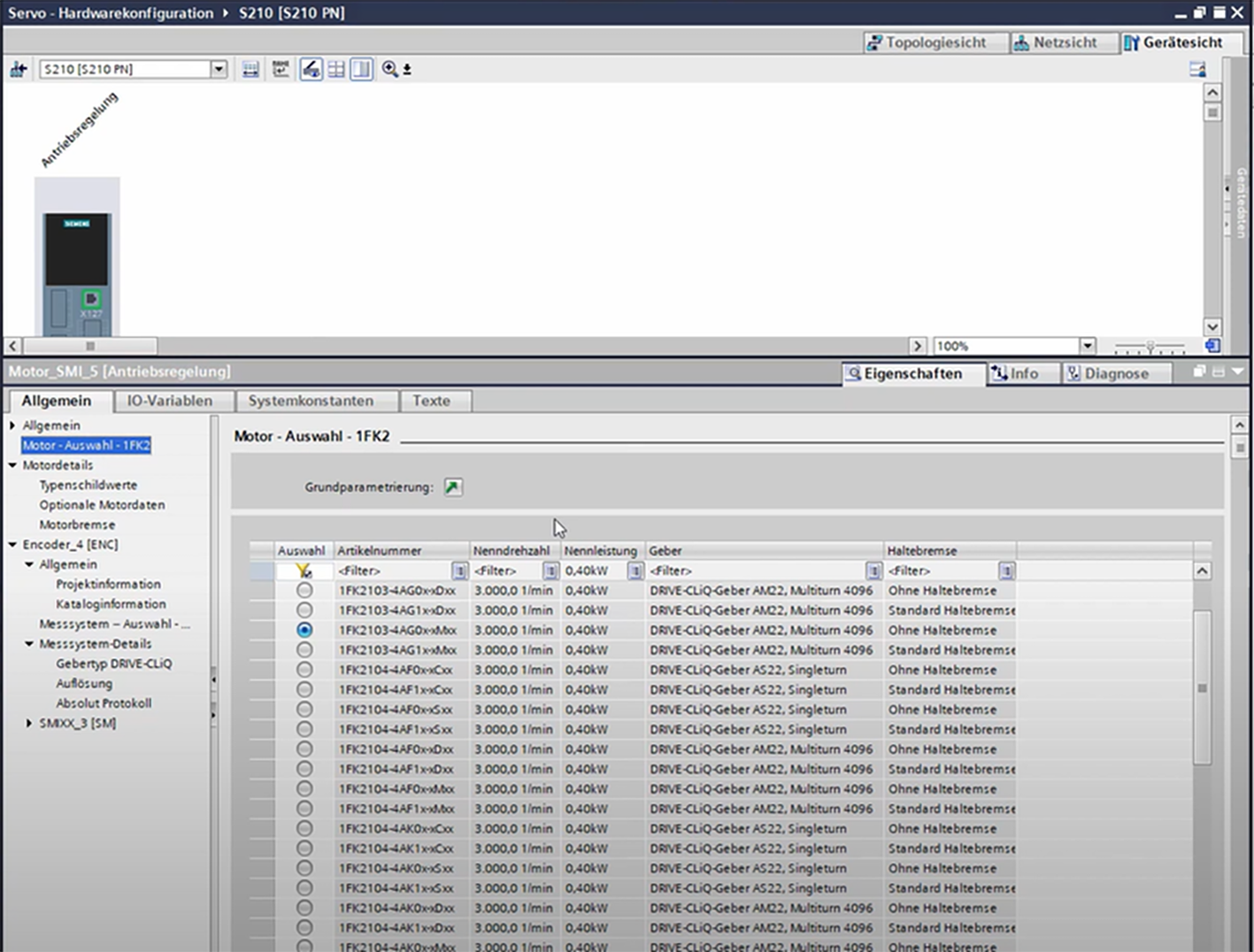
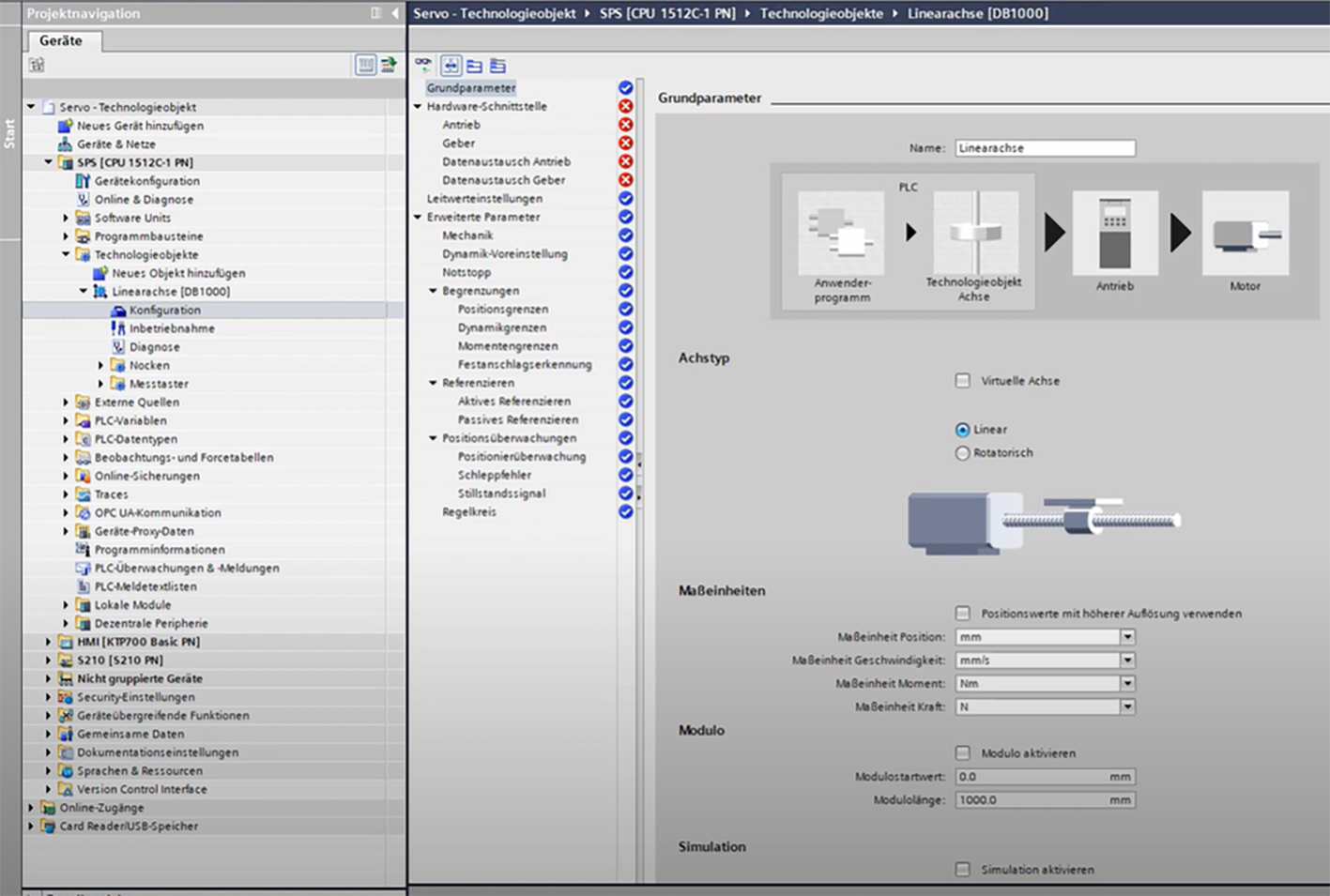
Dieser Artikel bietet eine strukturierte Anleitung für die Erstinbetriebnahme eines Antriebssystems im Siemens TIA Portal unter Verwendung eines Technologieobjekts (TO). Er behandelt die wichtigsten Schritte, von der grundlegenden Hardwarekonfiguration und Netzwerkeinrichtung bis hin zur Parametrierung, Kommunikation und Funktionsprüfung, und gewährleistet so einen zuverlässigen und sicheren Inbetriebnahmeprozess.
Er ist besonders relevant für Automatisierungsingenieure und SPS-Programmierer, die mit Siemens SINAMICS-Antrieben arbeiten. Er ersetzt jedoch nicht die Notwendigkeit tieferer Kenntnisse der Bewegungssteuerungsprinzipien, da eine falsche Parametrierung zu unsicherem Maschinenverhalten, mechanischen Schäden oder Personenschäden führen kann.