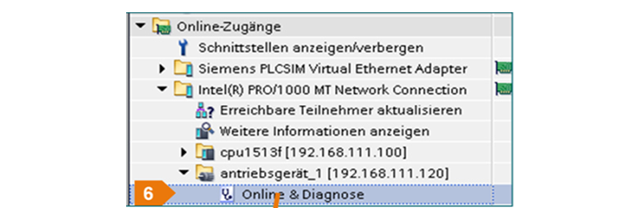
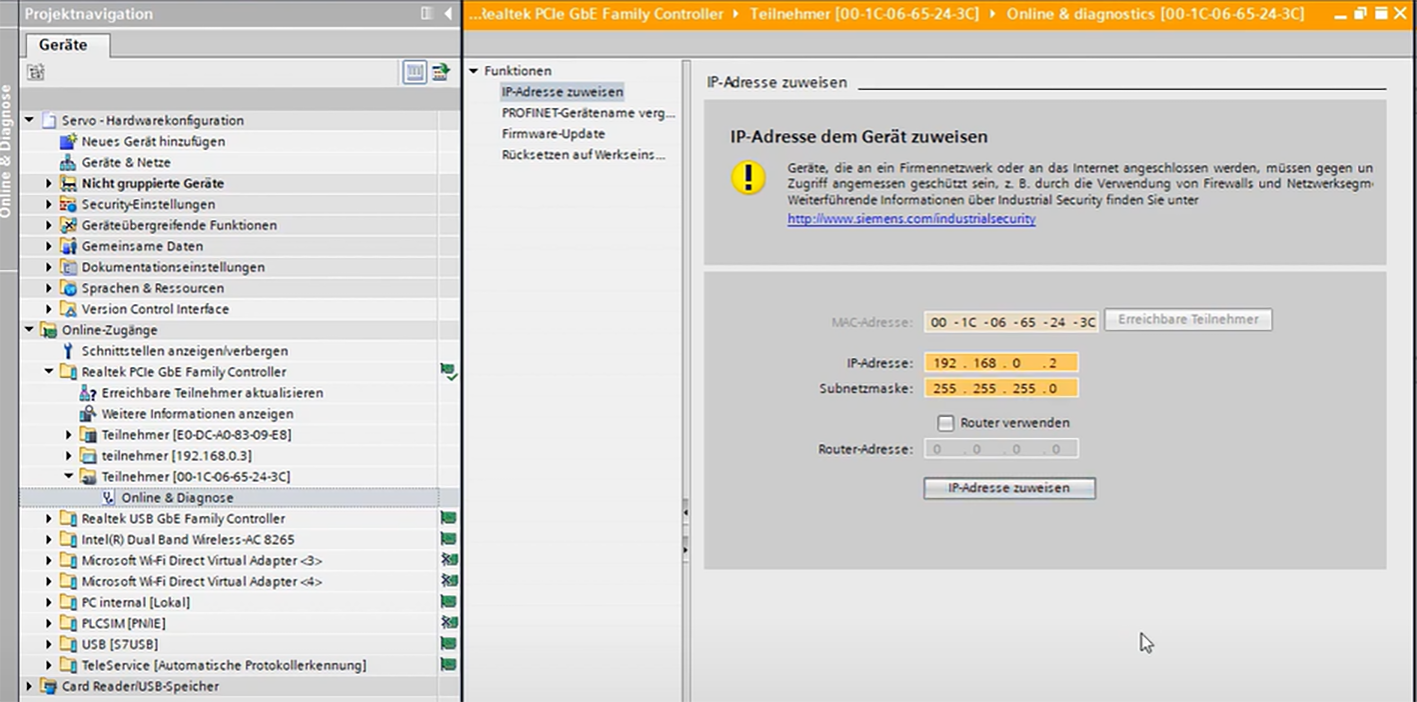
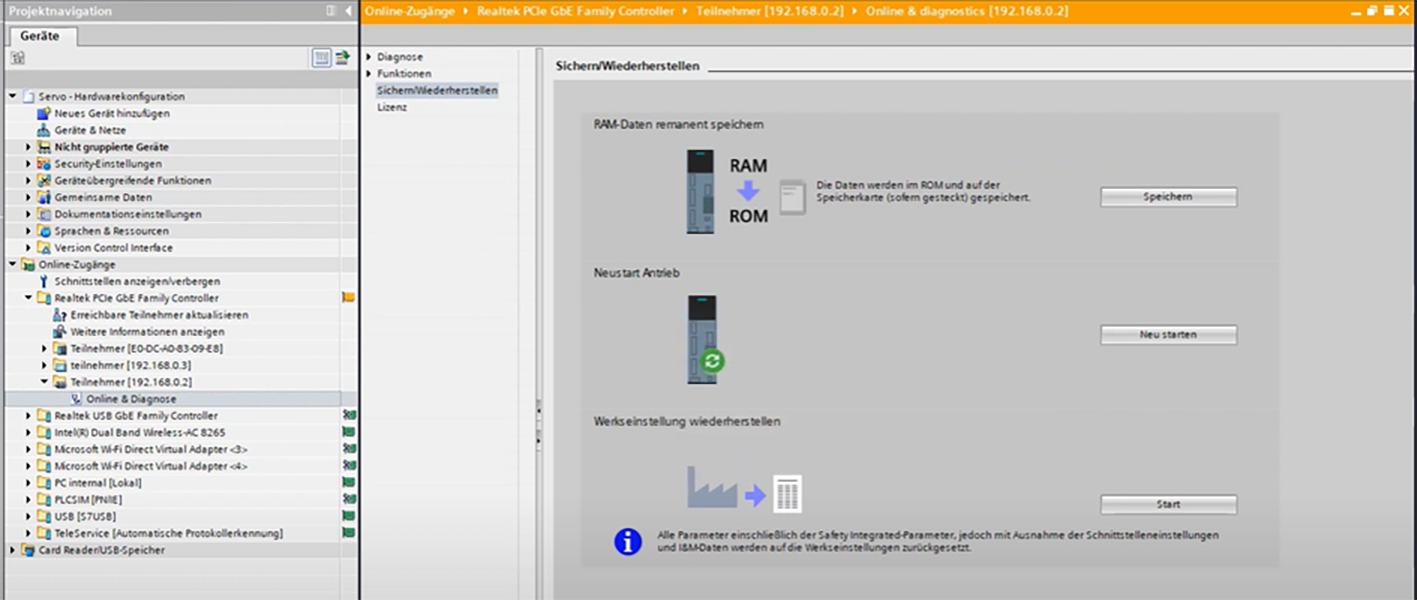
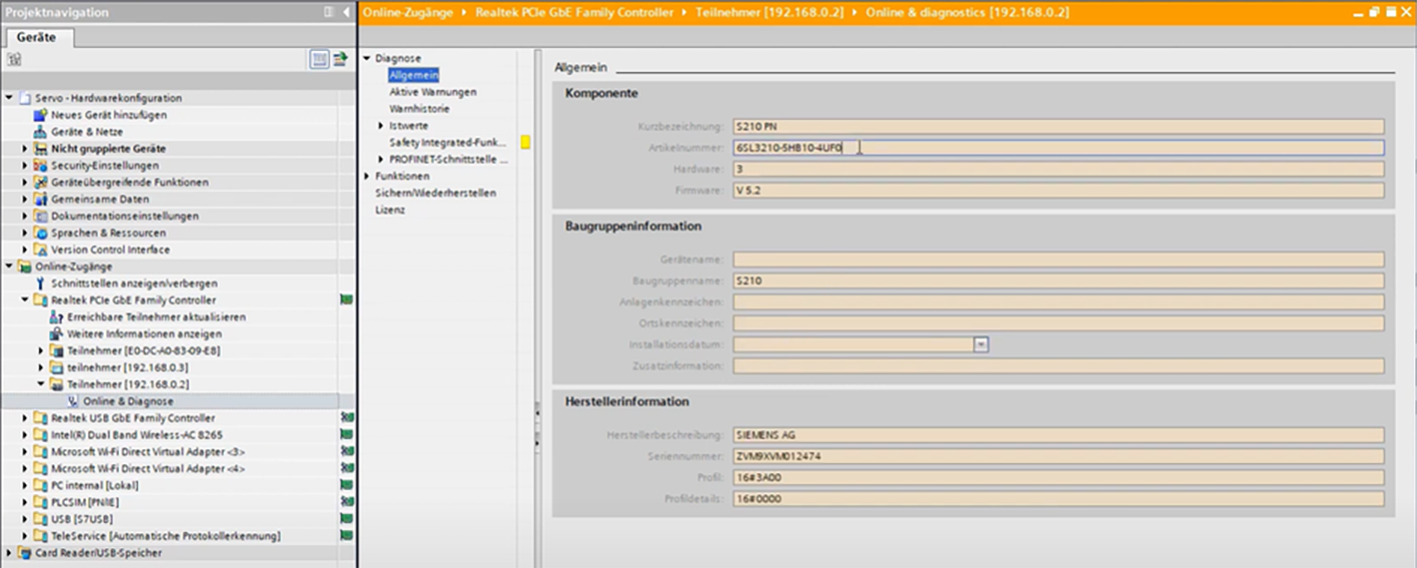
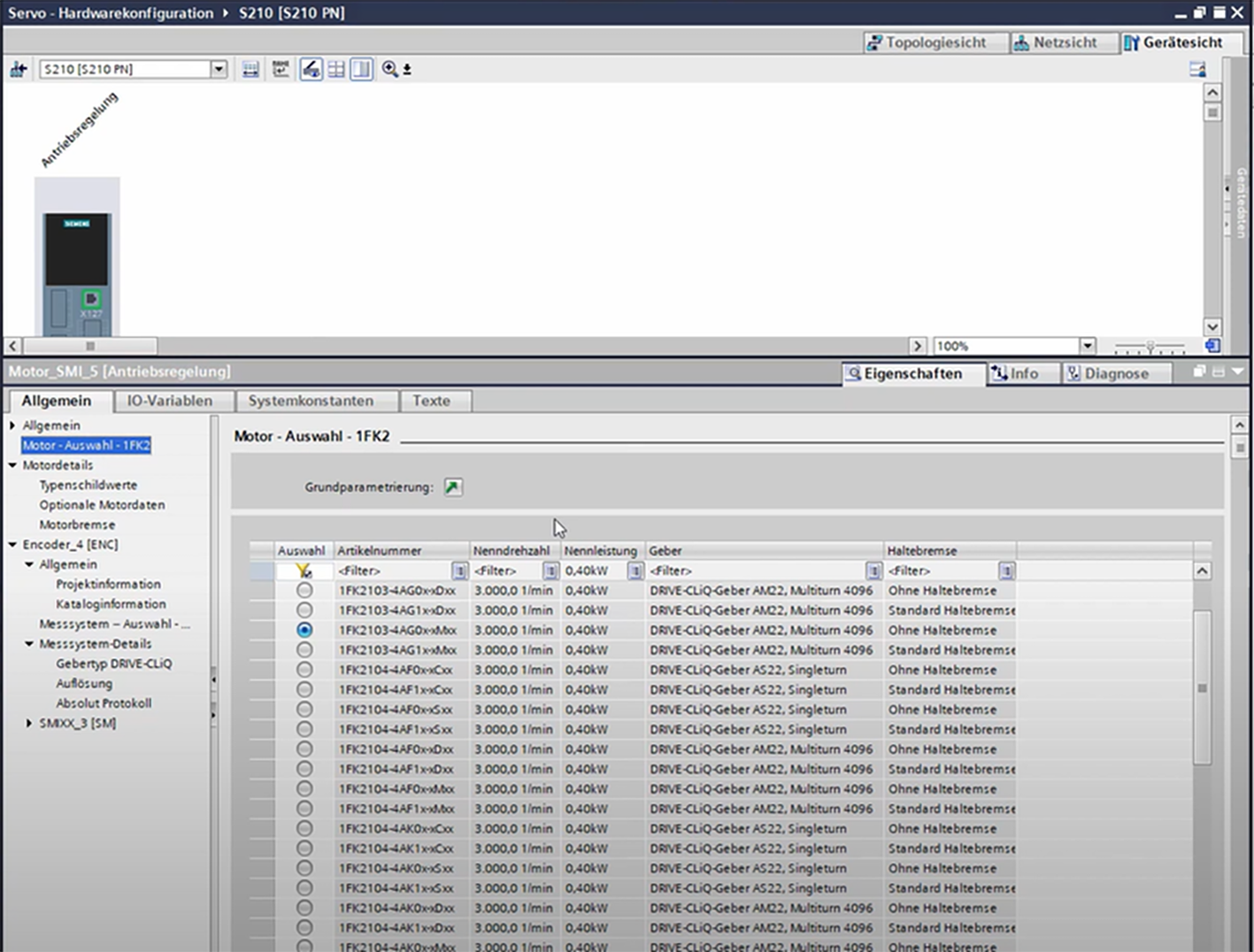
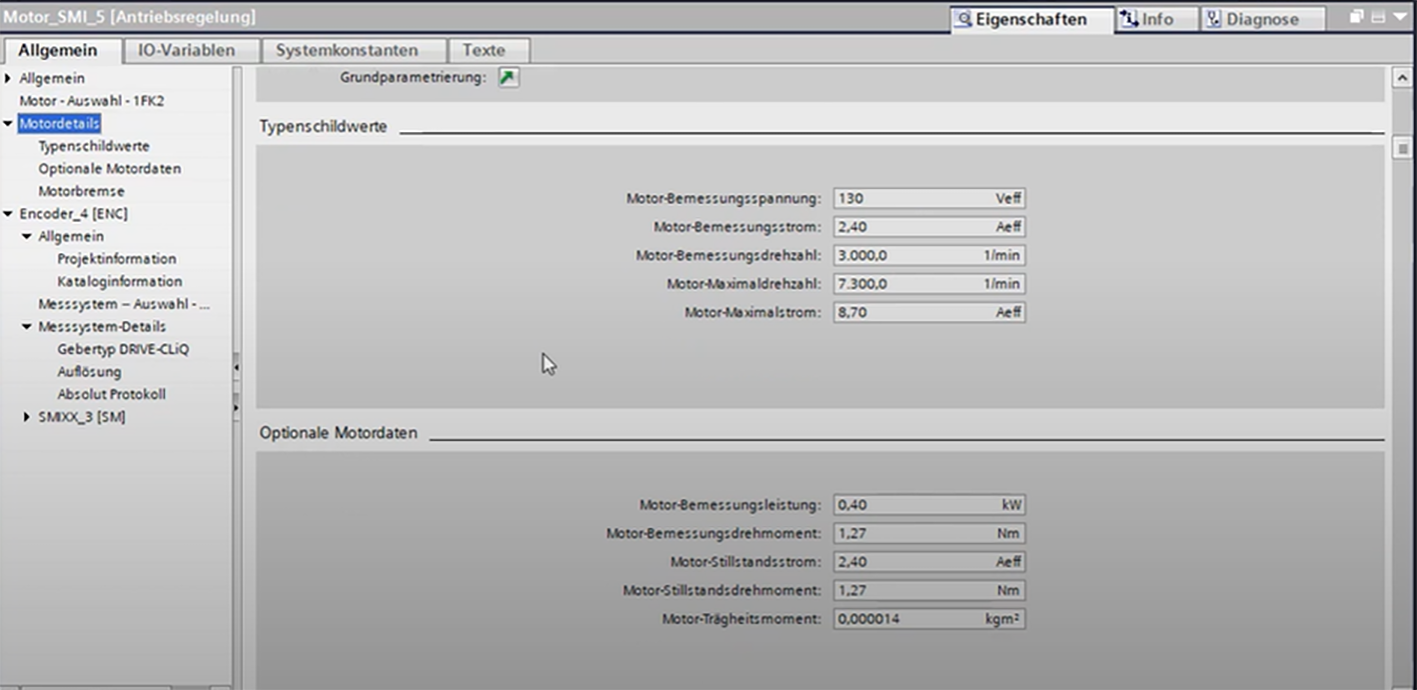
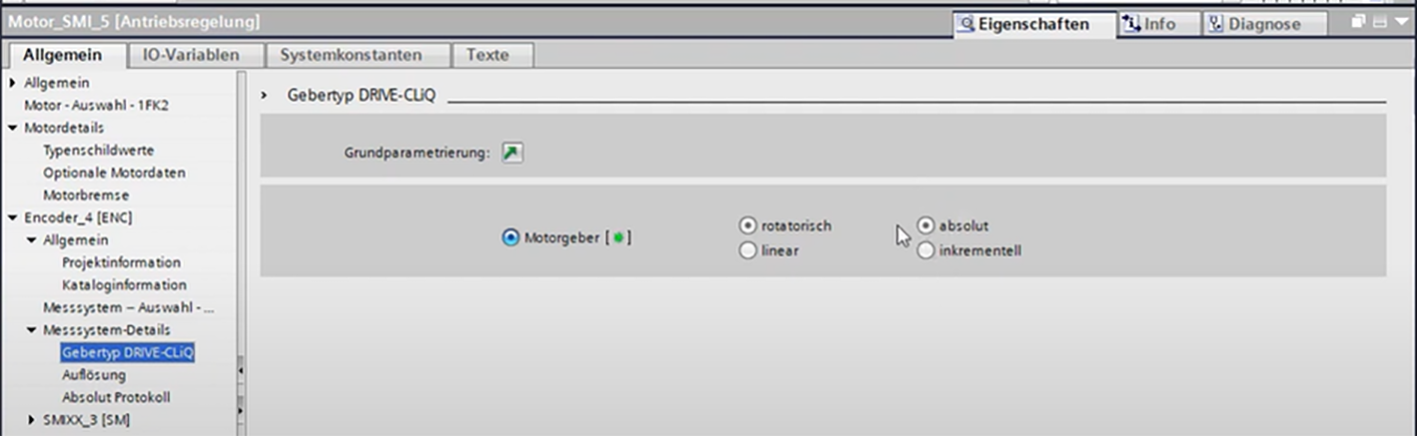
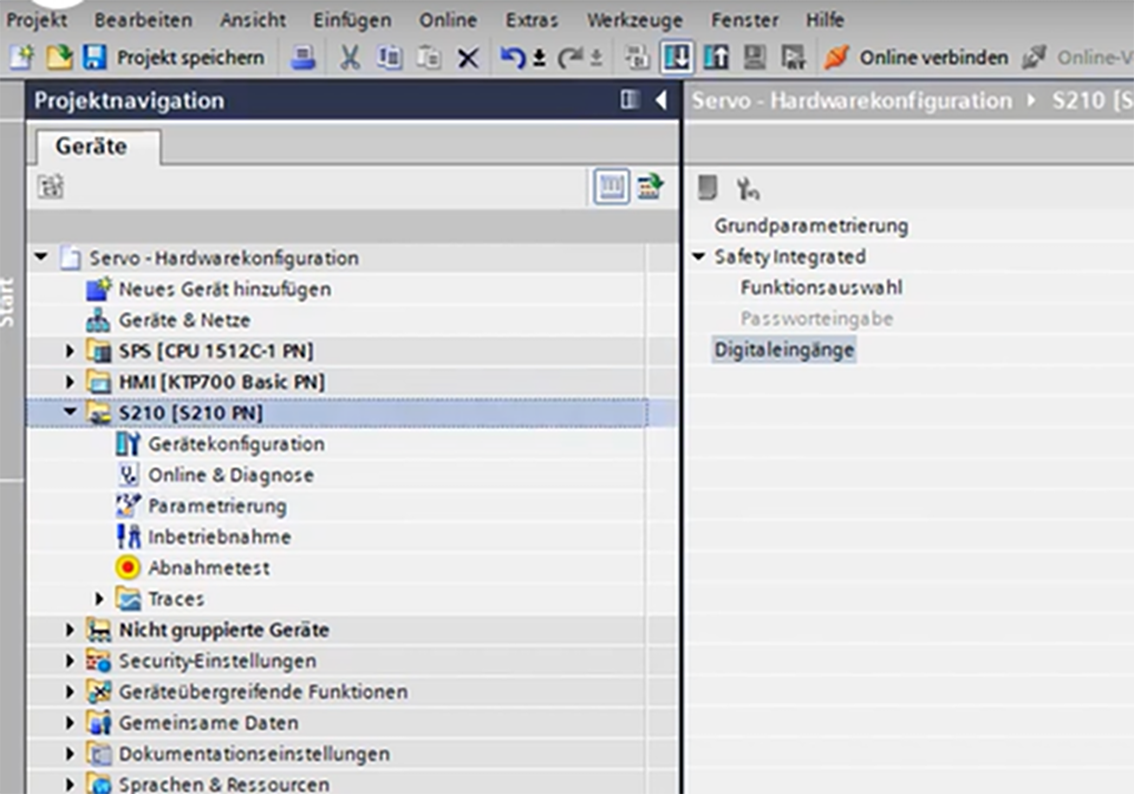
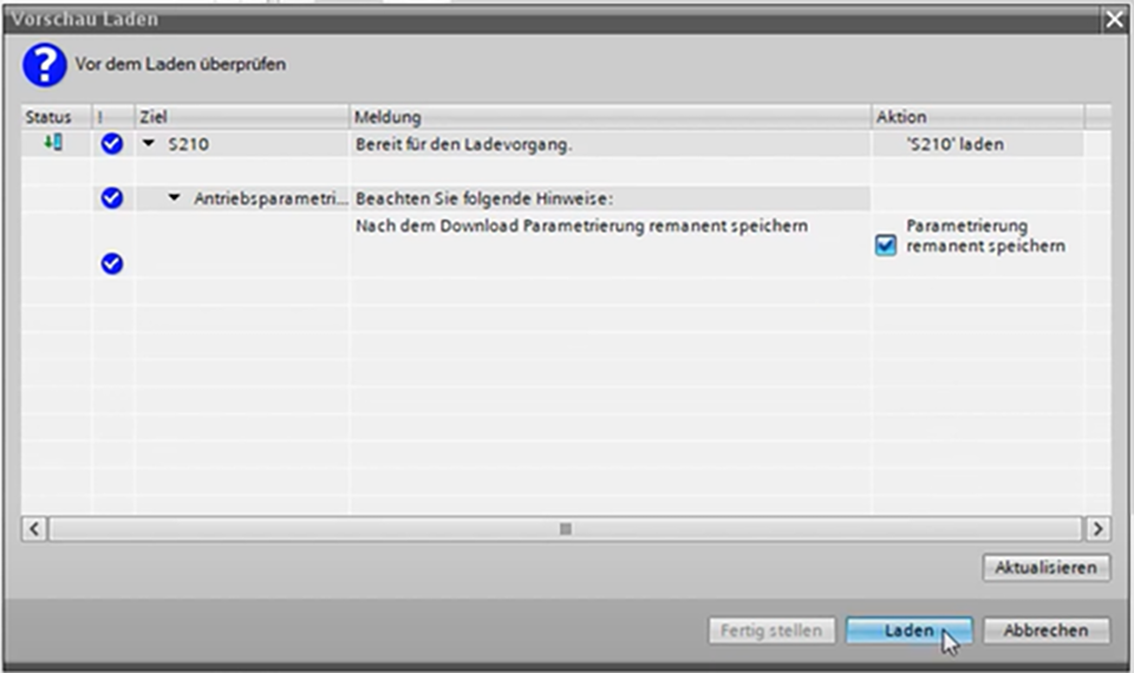
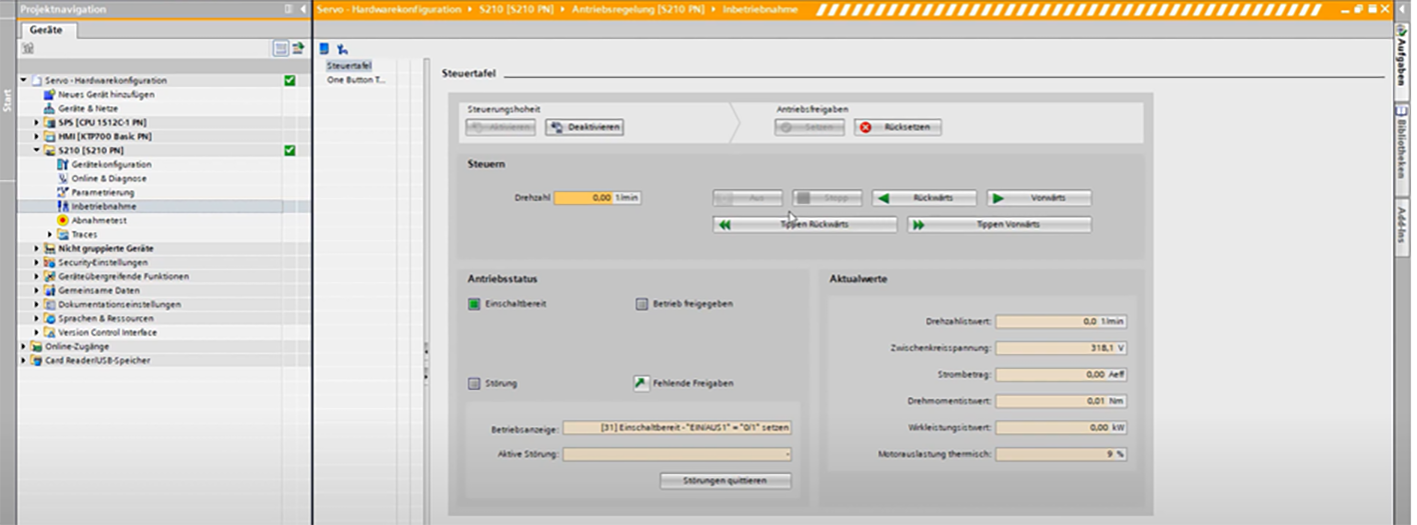
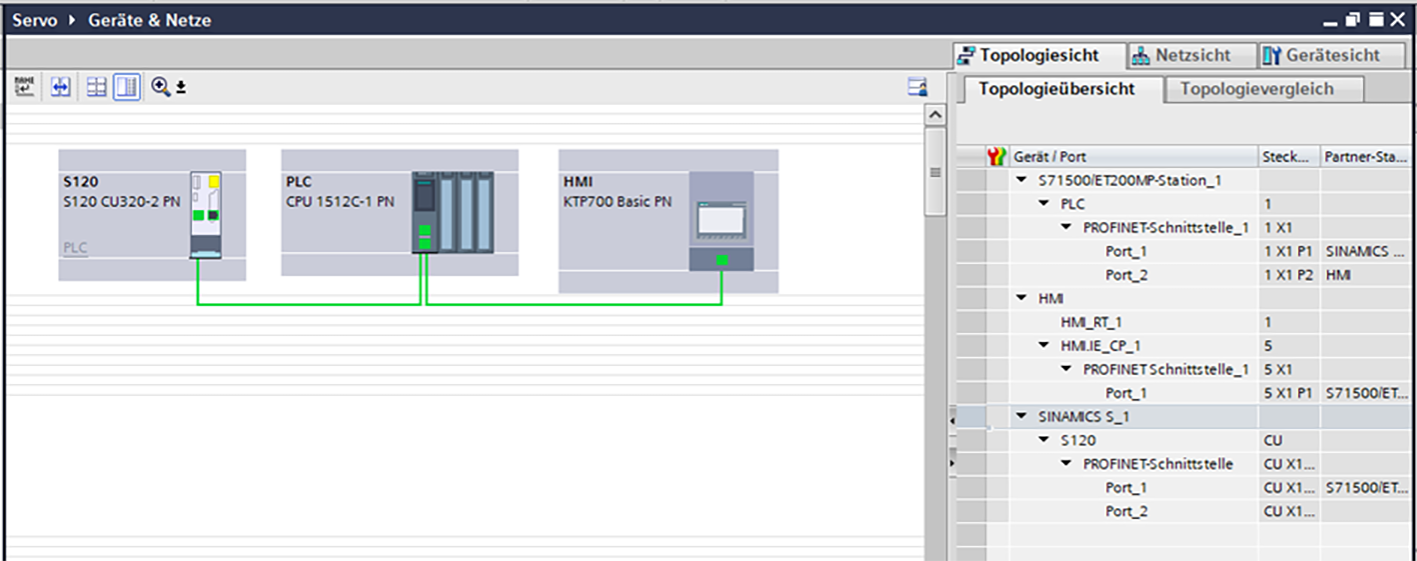
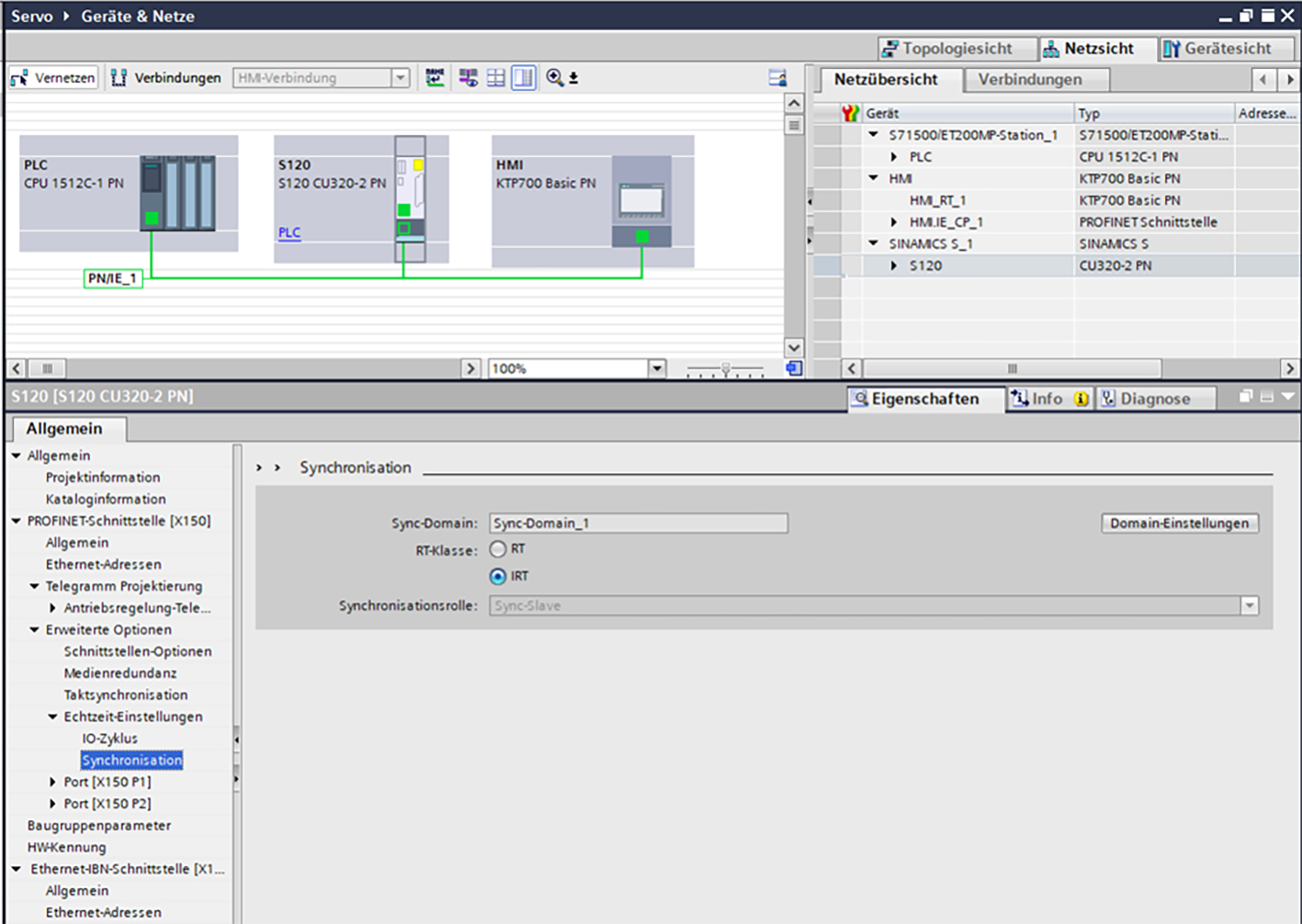
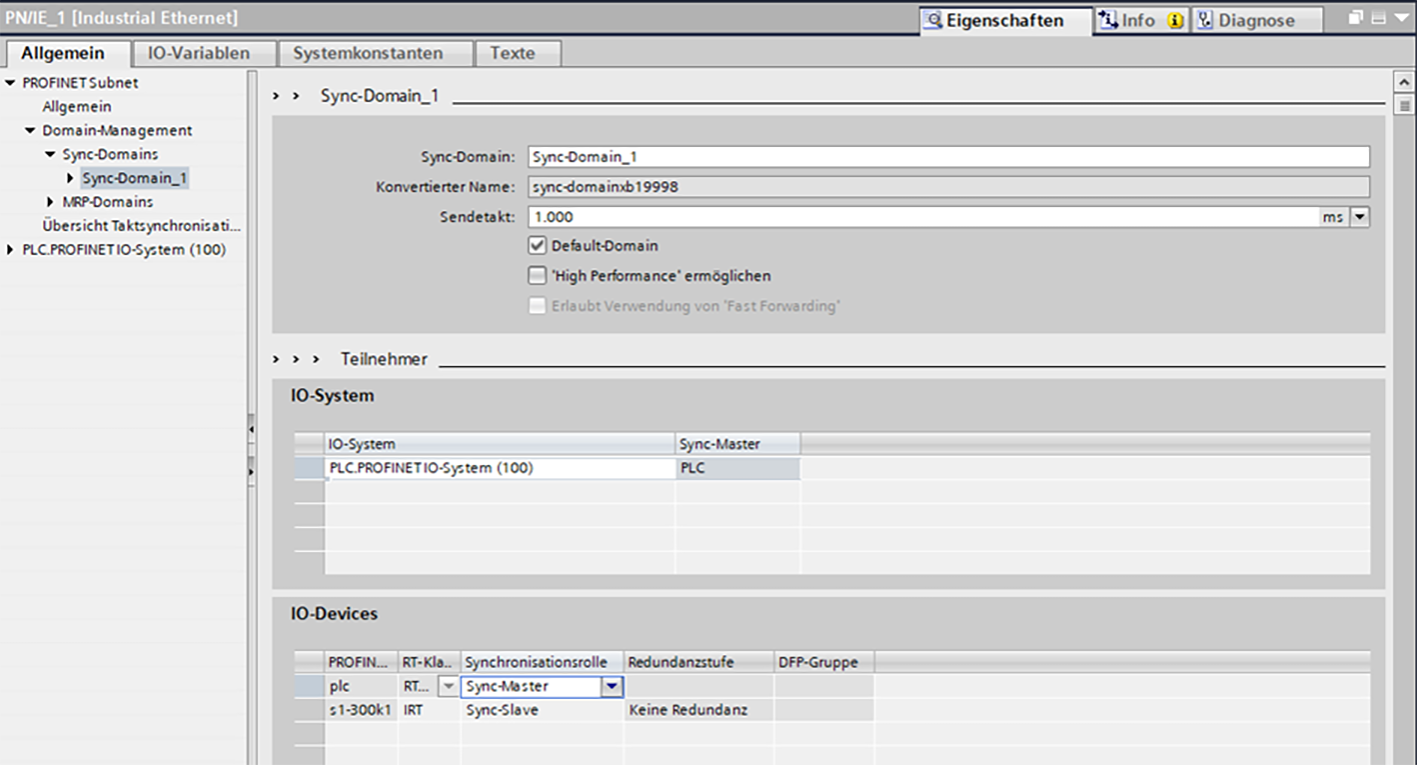
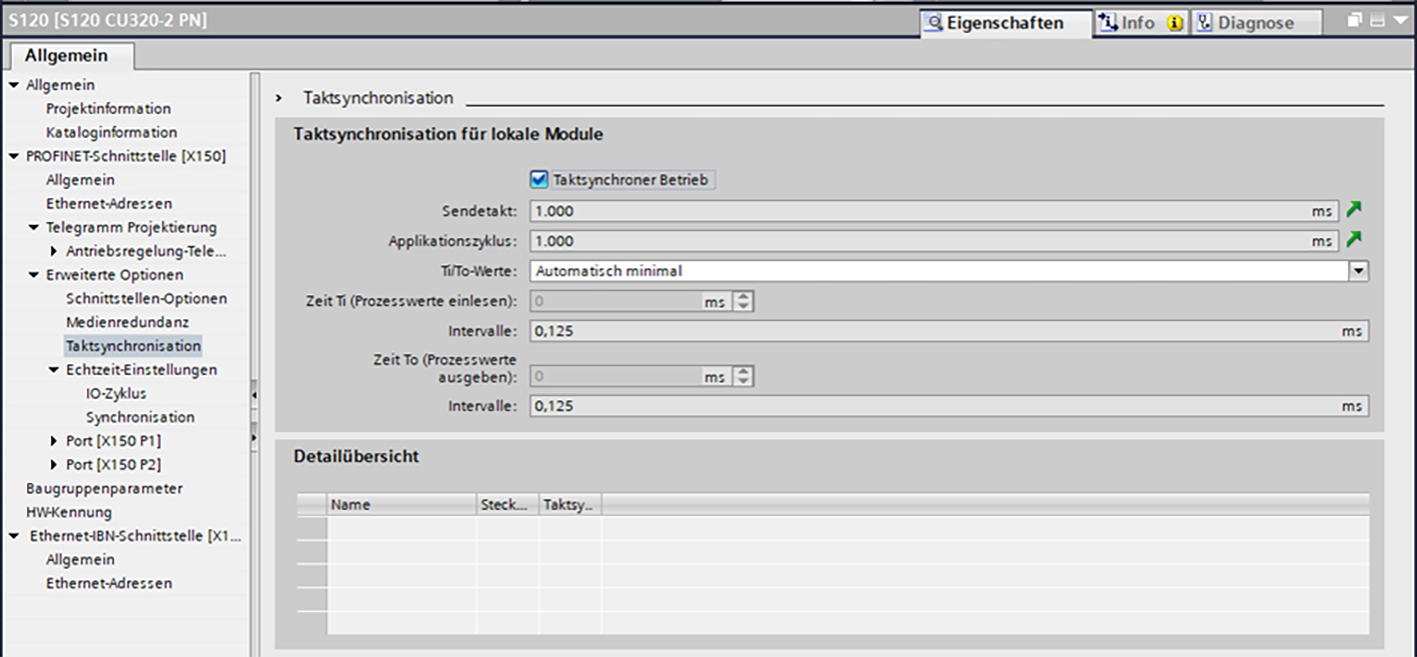
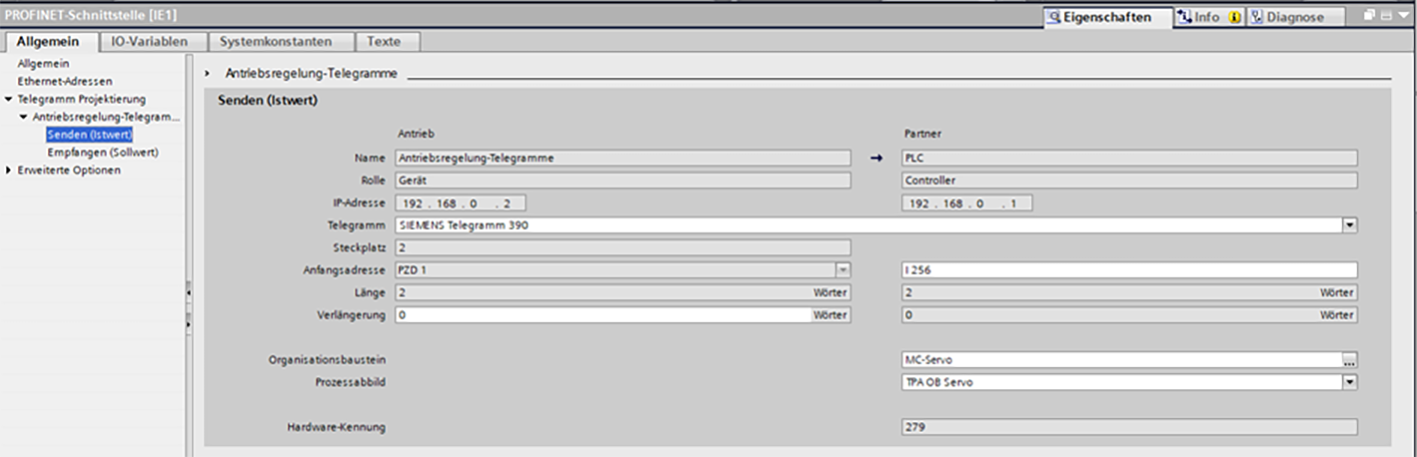
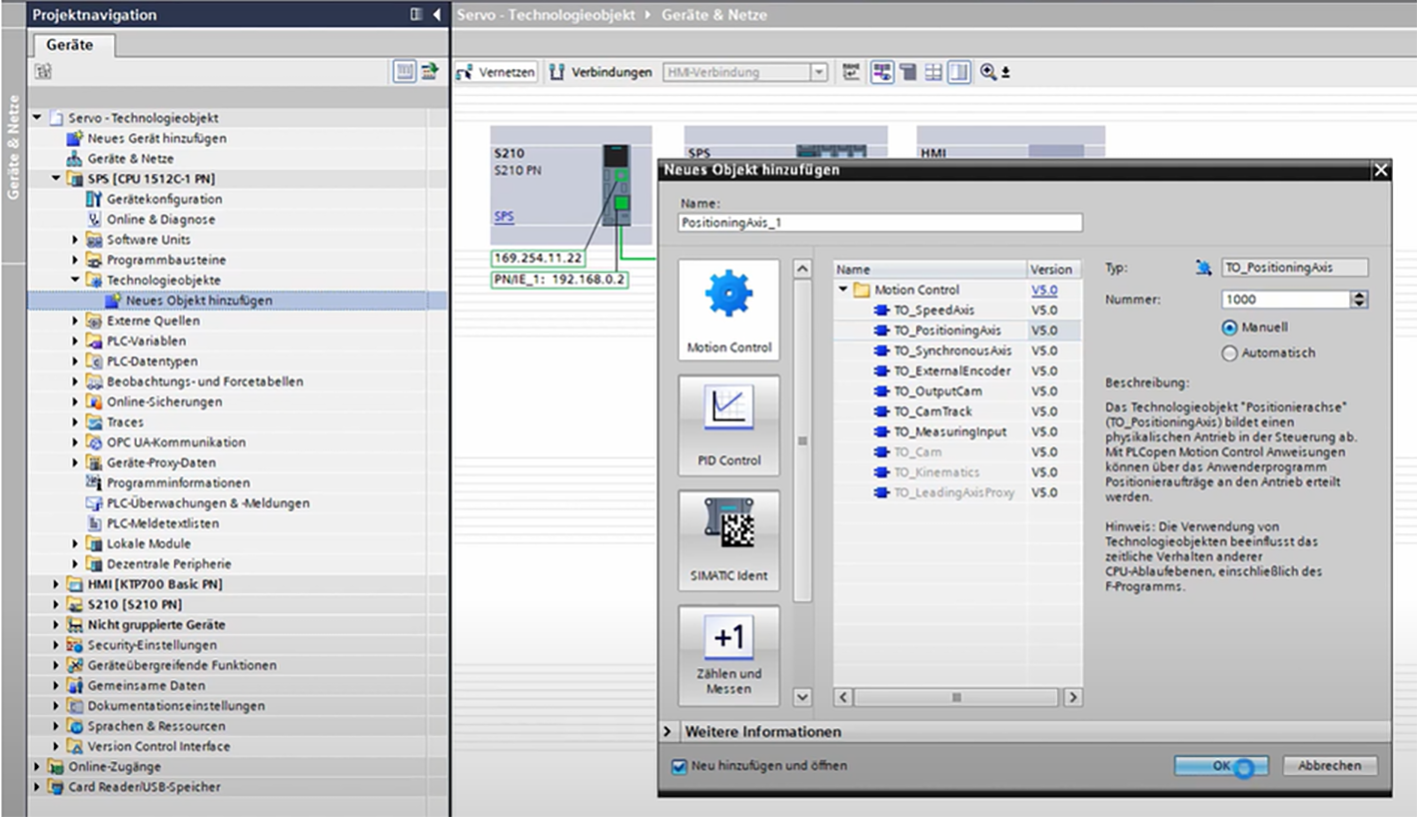
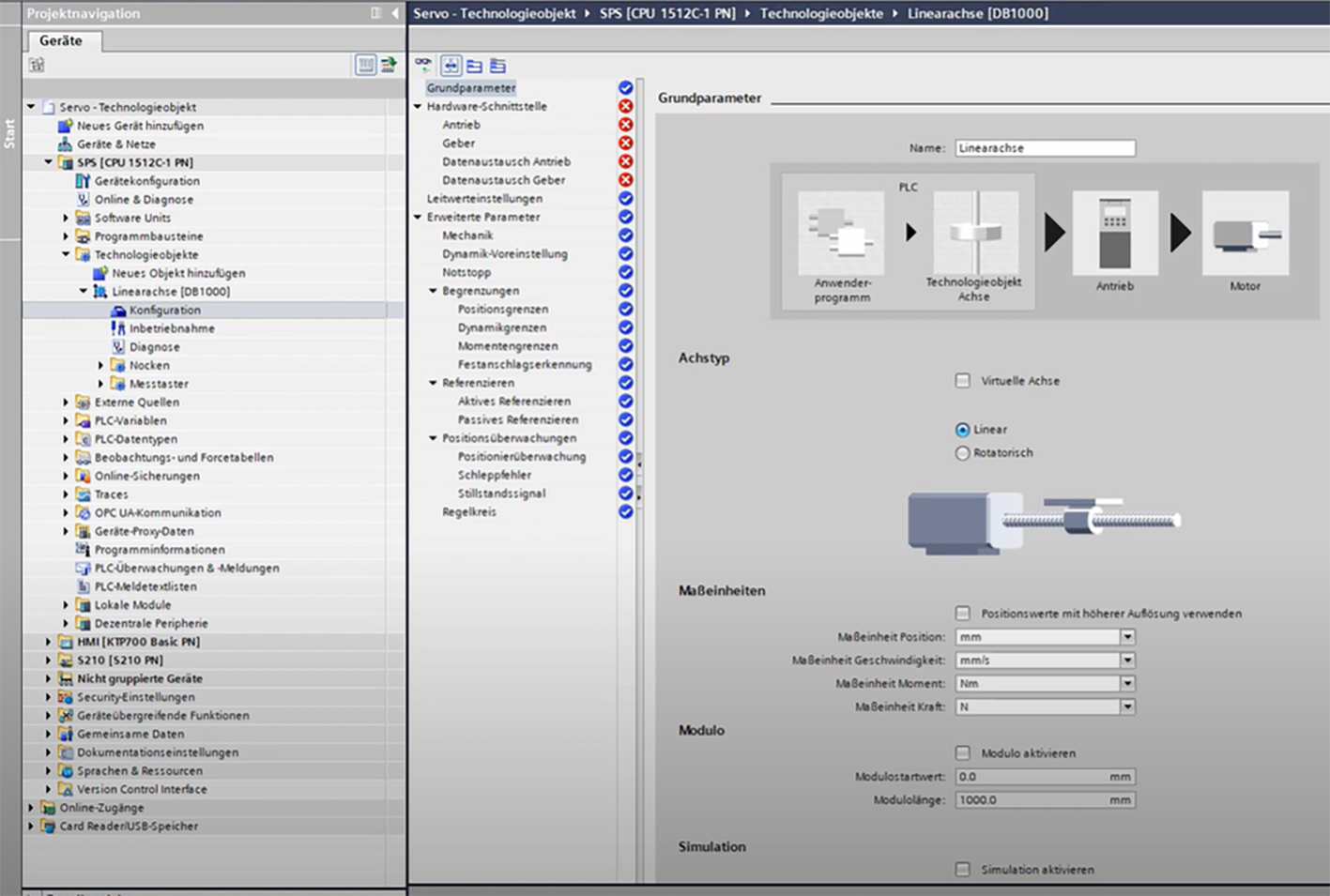
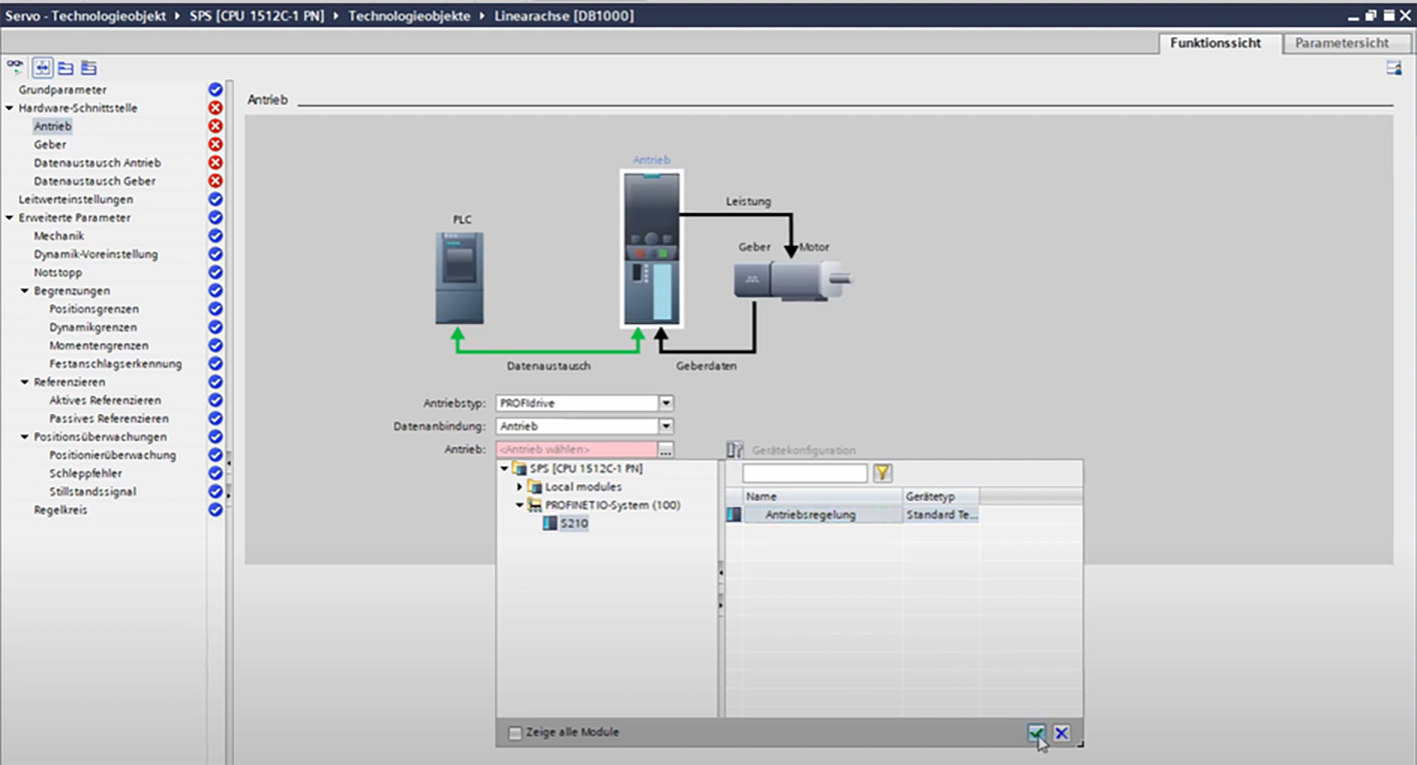
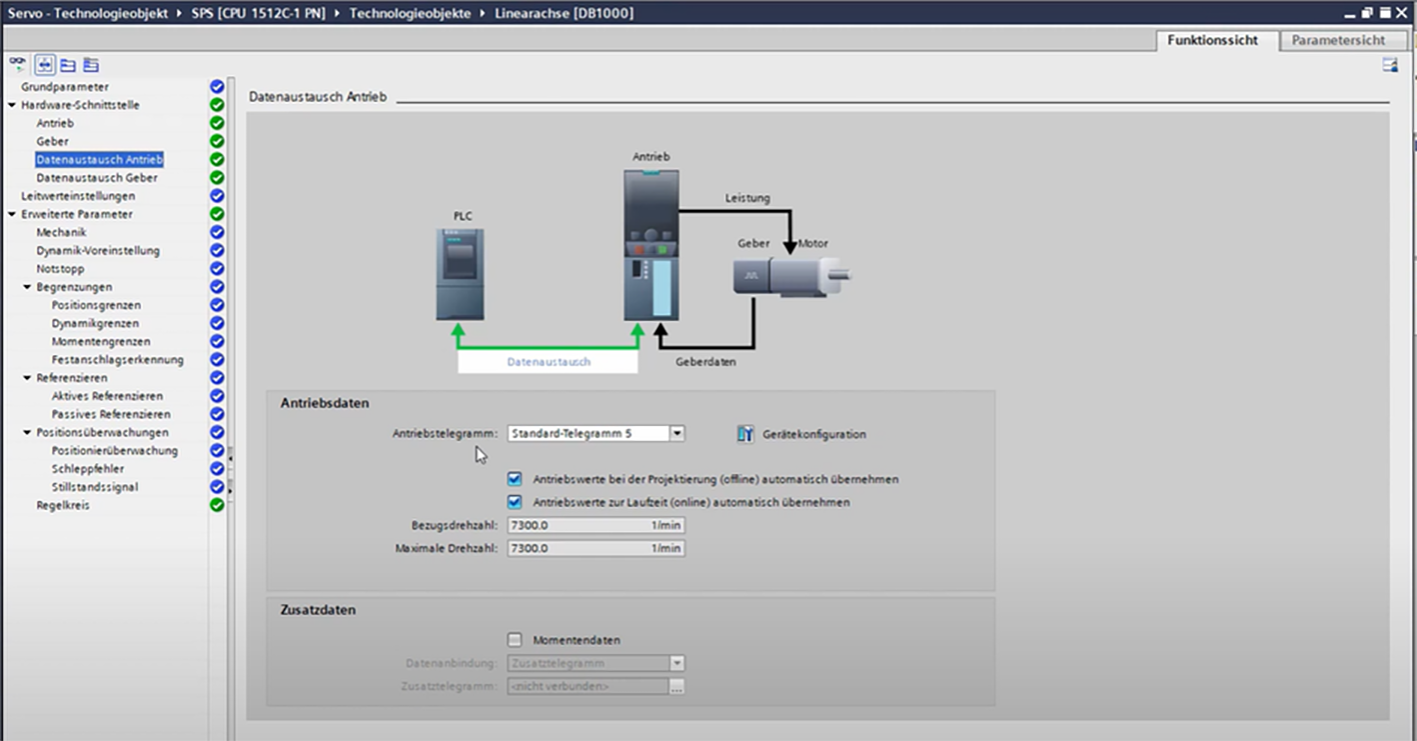
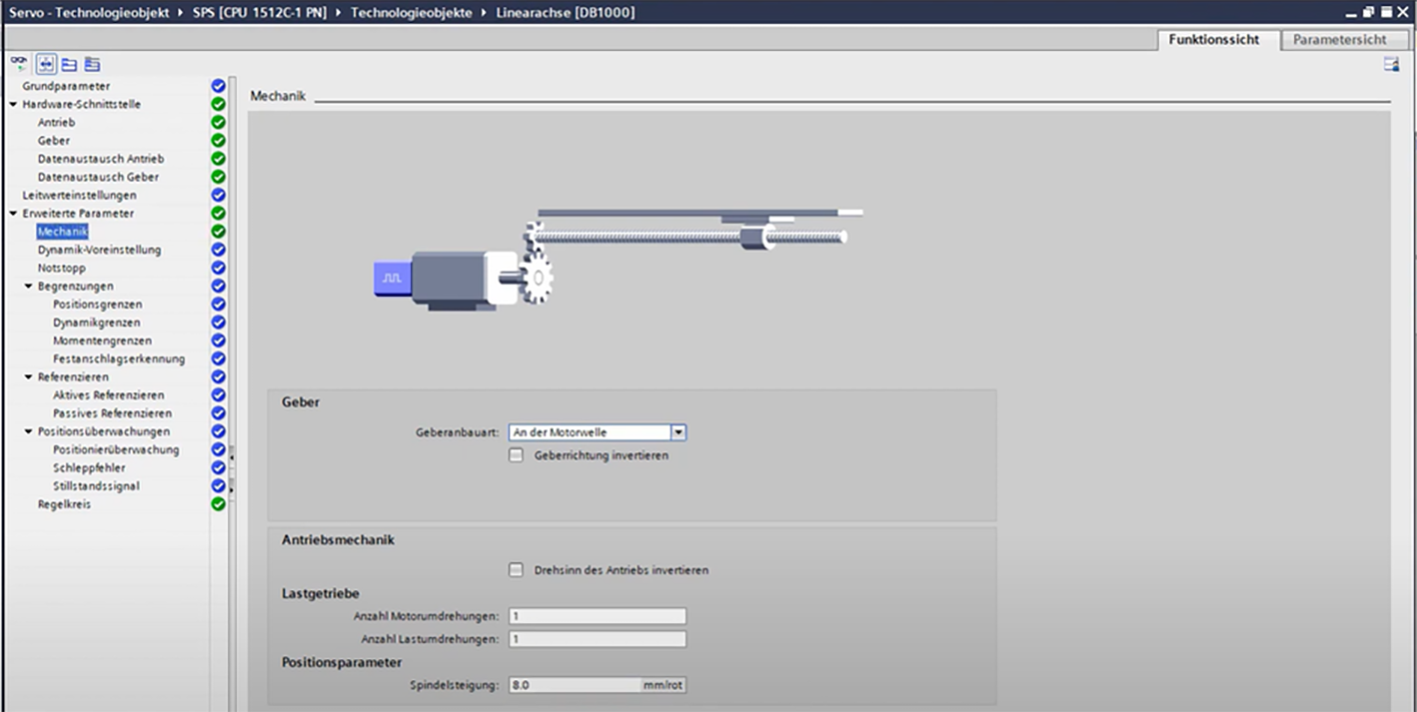
This article provides a structured guide for the initial commissioning of a drive system in Siemens TIA Portal using a technology object (TO). It covers the most important steps, from basic hardware configuration and network setup to parameterization, communication, and functional testing, ensuring a reliable and safe startup process.
It is particularly relevant for automation engineers and PLC programmers working with Siemens SINAMICS drives. However, it does not replace the need for deeper knowledge of motion control principles as incorrect parametrization can lead to unsafe machine behavior, mechanical damage, or personal injury.