Stuck during the initial I/O check, with nothing working and no movement in sight? Are TwinCAT’s cryptic error messages and baffling ADS error codes leaving you scratching your head, with no clear indication of what’s gone wrong?
Don’t worry—you’re not alone! In this blog post, we’ll explore some practical tips and handy tools to help you troubleshoot and resolve these issues, getting your machine running smoothly in no time.
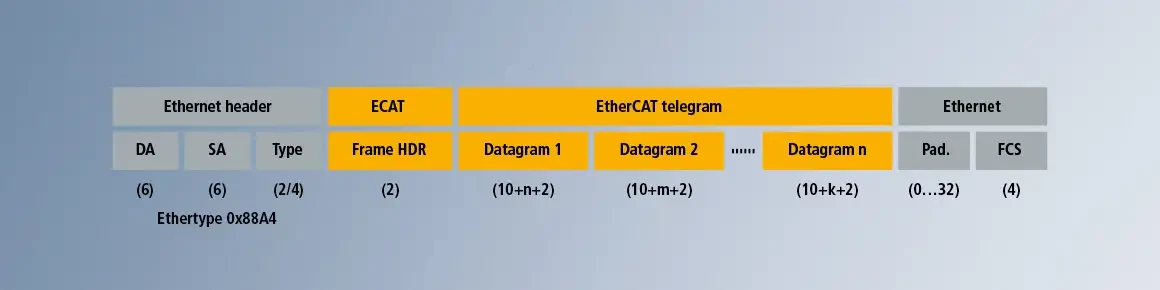
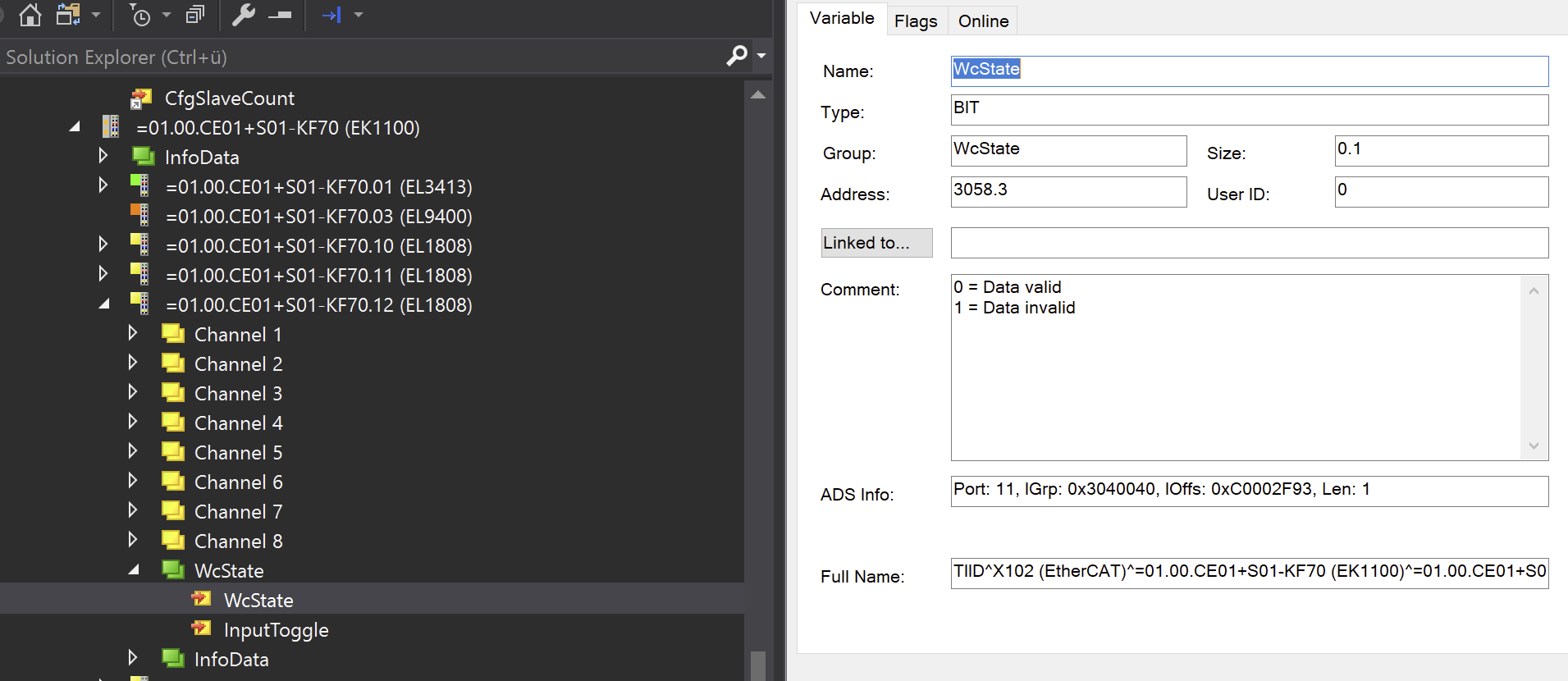
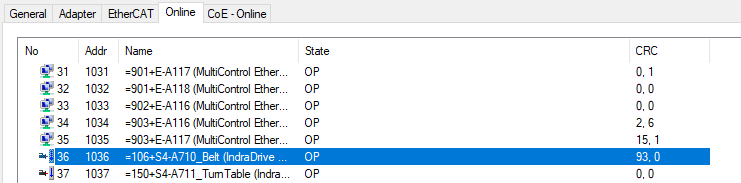
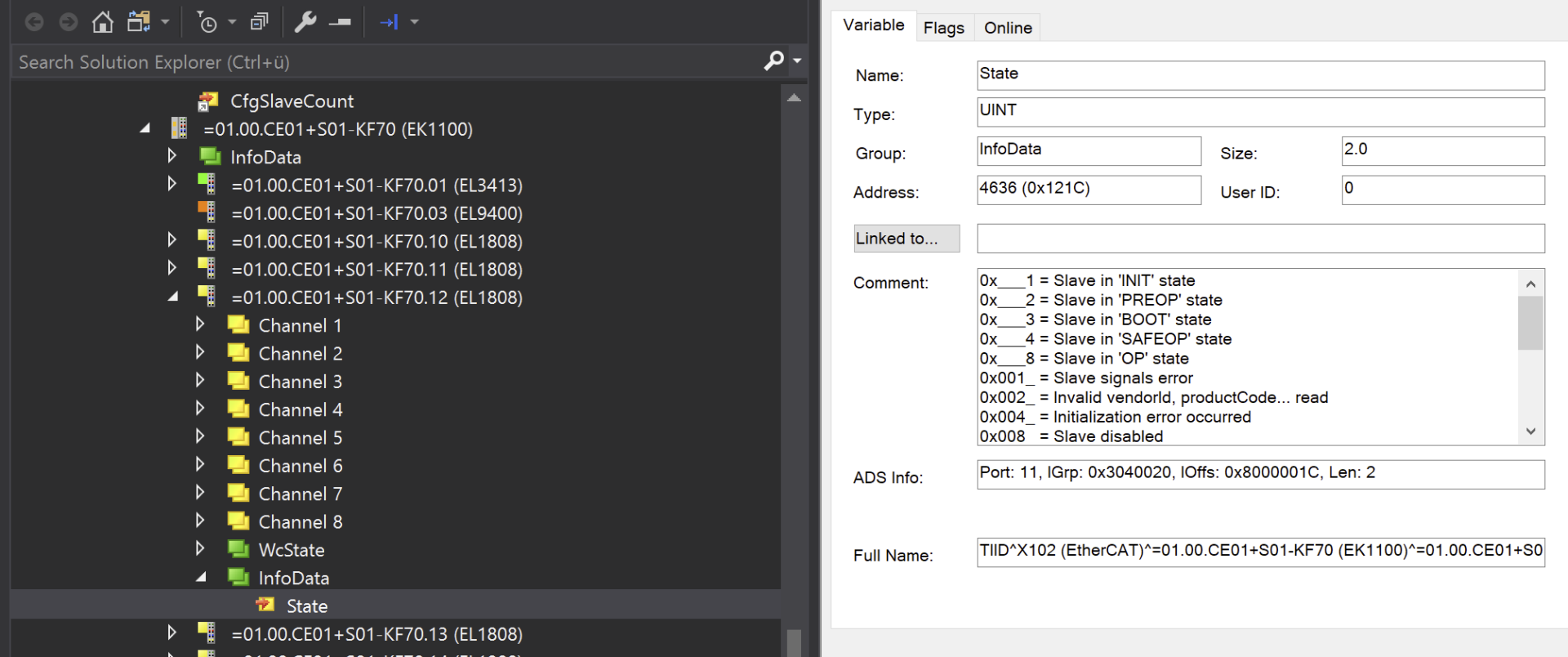
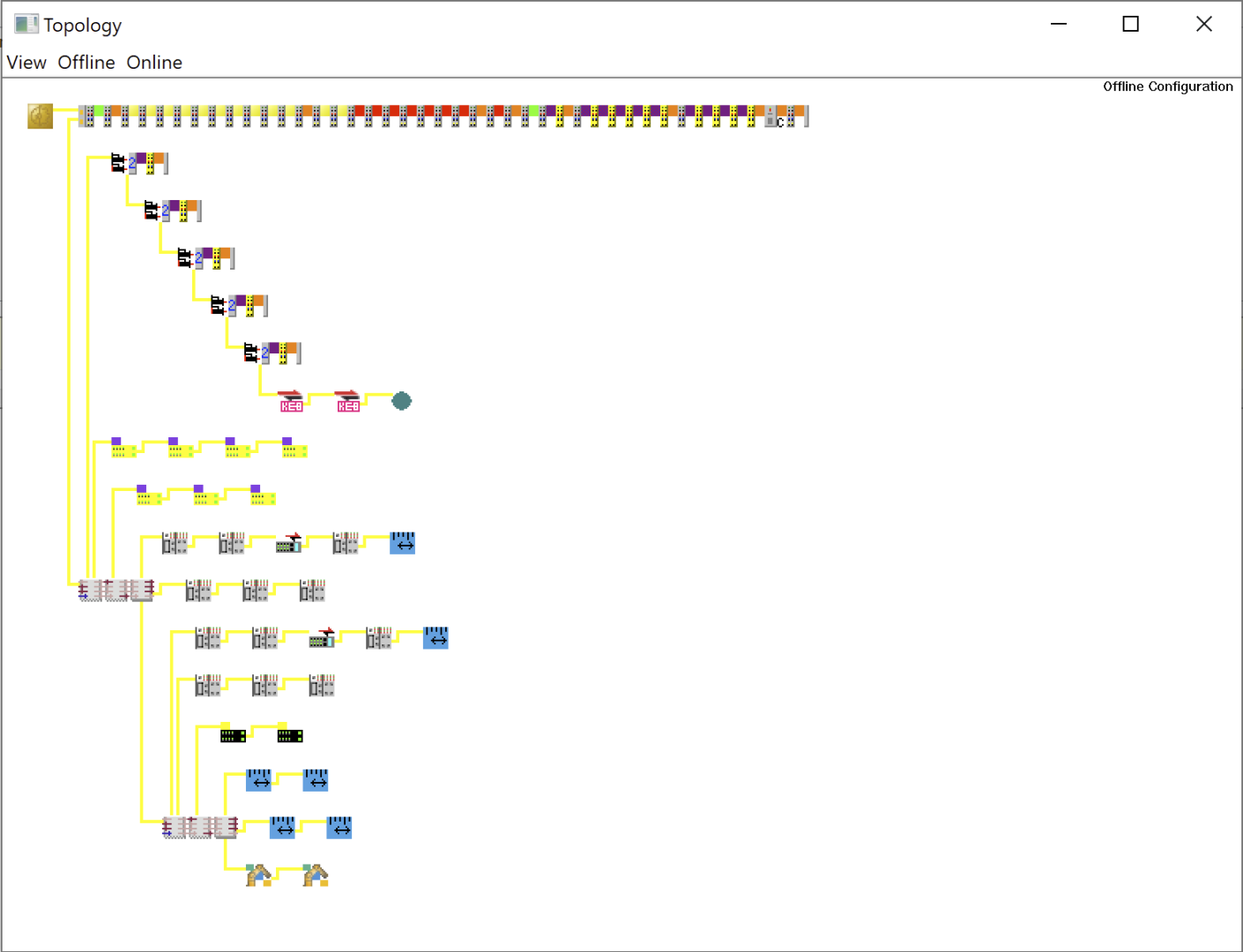
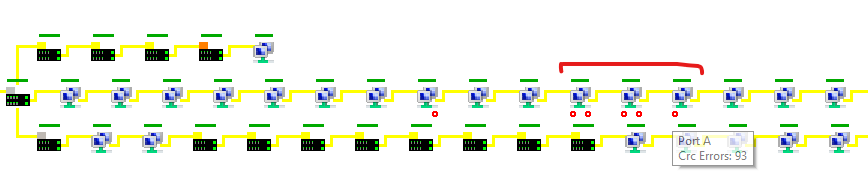
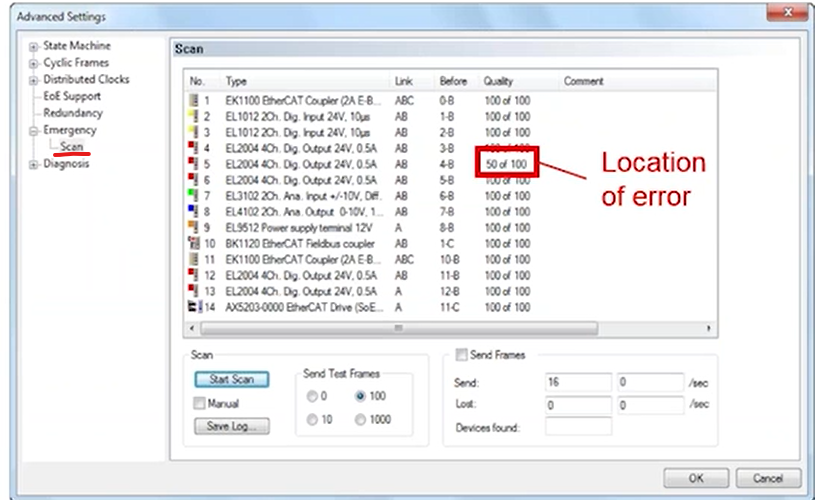
In this article, we will describe various tools and methods for troubleshooting EtherCAT networks with TwinCAT 3. Cyclical diagnostics using checksums and error counters, monitoring device states using the state machine, and visual error analysis in the topology view will be explained in detail. For particularly difficult cases, we show you the emergency scan, which can localize communication problems using targeted test frames. So let’s get started!